GPS PREDICTIONS
Precomputed orbit and clock products for PPP, designed to reduce reliance on continuous real-time correction streams.
Performance (Example Day)
- Orbit agreement vs RTS: ~5 cm RMS
- Clock agreement vs RTS: ~0.5 ns RMS
- Availability: 100% (no missing epochs)
This is paragraph text. Click it or hit the Manage Text button to change the font, color, size, format, and more. To set up site-wide paragraph and title styles, go to Site Theme.
High-Accuracy GNSS Orbit and Clock Predictions for PPP Workflows
- 100% data availability — no missing epochs, no reliance on continuous connectivity
- Instant positioning capability — no delay in time-to-first-fix (TTFF)
- Flexible temporal resolution — configurable from 1s to 30s (24-hour horizon standard)
- Precomputed SP3 products — available prior to first prediction epoch
High-accuracy GNSS orbit and clock predictions for PPP workflows.
This approach reduces reliance on continuous real-time correction streams by providing precomputed SP3 products with full data availability and no connectivity requirements.
Designed for applications where consistency, availability, and deployment simplicity are critical.
Request today’s dataset to evaluate performance in your own workflow.
Analysis
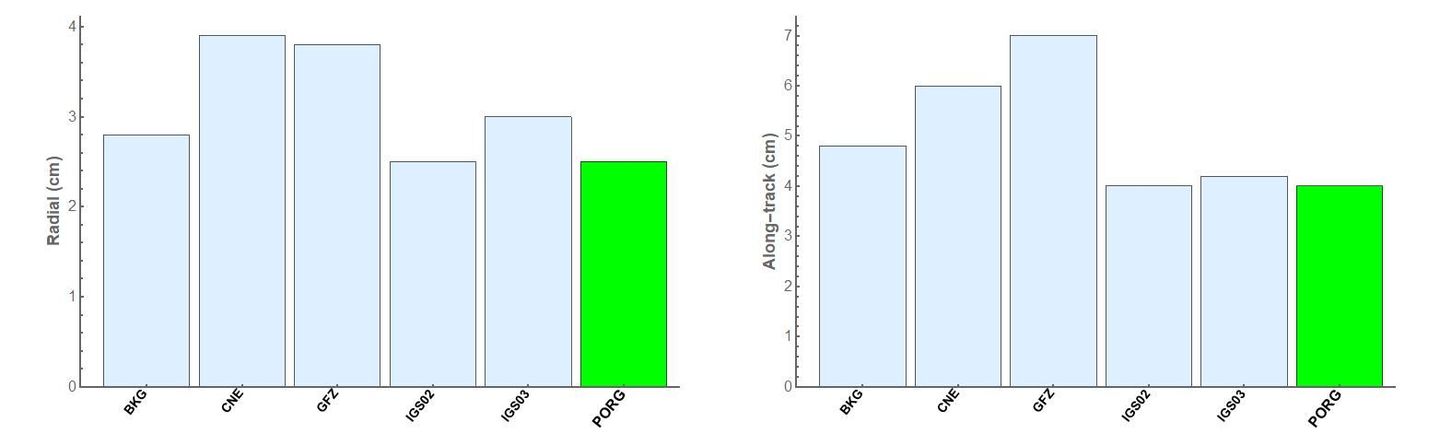
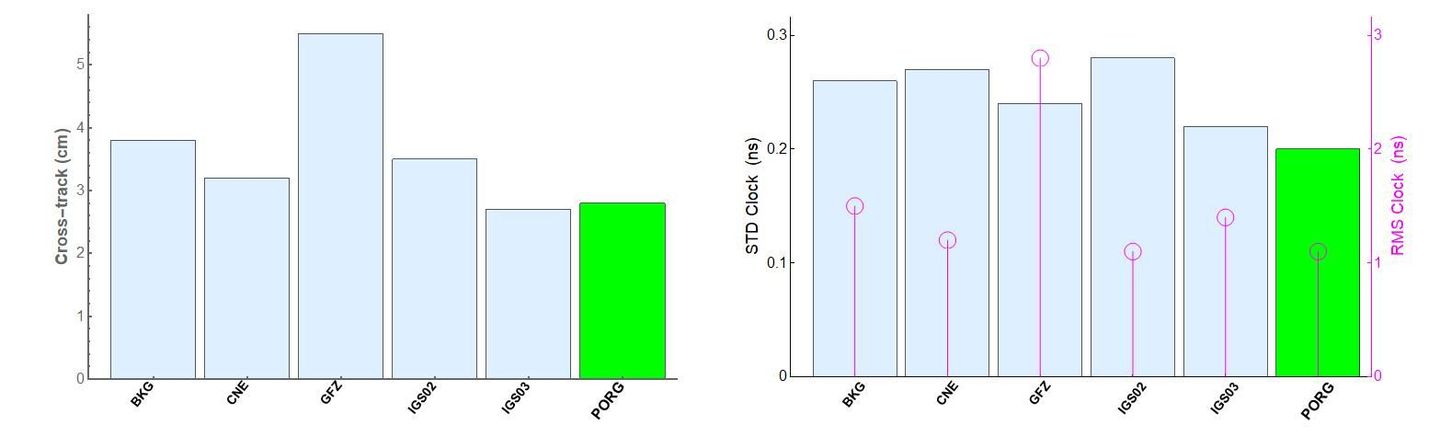
*RTS vs PORG analysis shown for a typical GPS week. Higher accuracies are achievable with a single midday update.
Future Development
We are currently exploring the extension of this approach to non-terrestrial positioning systems, including the development of predicted orbit and clock products for lunar navigation
This includes the generation of SP3-format ephemerides in a selenographic reference frame, supporting future lunar GNSS concepts and positioning frameworks.
These efforts are aligned with emerging lunar navigation architectures and aim to provide similar advantages in availability, independence from continuous correction streams, and flexible deployment.